This year the Design Research Laboratory (DRL) concluded the final year of the four-year design research agenda Proto-Design, which investigated digital and analogue forms of computation in the pursuit of systemic design applications that are scenario- and time-based. Considering controls systems as open acts of design experimentation, the DRL examines production processes as active agents in the development of architecture. Behavioural, parametric and generative methodologies of computational design are coupled with physical computing and analogue experiments to create dynamic and reflexive feedback processes. New forms of spatial organisation are explored not as type- or context-dependent but by examining scenarios that evolve as ecologies and environments that seek adaptive and hyper-specific features.
This performance-driven approach aims to develop novel design proposals concerned with the everyday. The iterative methodology of the design studio focuses on the investigation of spatial, structural and material organisations, engaging with contemporary discourses of architecture and urbanism. Four research studios run in parallel, exploring the possibilities of Proto-Design. Theodore Spyropoulos’ studio, Synthetic Natures: Behavioural Machines, investigates behaviour as the means to explore self-regulating and deployable soft systems. Parametric Semiology 2 – Habitat as System of Signification, led by Patrik Schumacher, focuses on how the societal function of urban and architectural design can act as an innovative ordering and framing of communicative interaction. Robert Stuart-Smith’s studio, Behavioural Matter, explores how non-linear design processes may be instrumentalised to generate a temporal architecture with a designed life-cycle. Reconsidering Elementarism, led by Philippe Morel, addresses the relationships between technology, architecture and mathematics by revisiting research on Elementarism in the 1920s and its cybernetic reinterpretations of the 1960s.
Director
Theodore Spyropoulos
Founder
Patrik Schumacher
Course Masters
Shajay Bhoosan
Philippe Morel
Robert Stuart-Smith
Course Tutors
Pierandrea Angius
Mollie Claypool
Ryan Dillon
Mostafa El-Sayed
Manuel Jiménez García
Jose Sanchez
Technical Tutors
Albert Taylor & AKT
Software Tutors
Torsten Broeder
Paul Jeffries
Tyson Hosmer
Programme Coordinator
Ryan Dillon
Invited Critics
Lucy Bullivant
Helen Castle
Mark Cousins
Didier Faustino
David Jason Gerber
David Greene
Adrian Lahoud
Marta Malé- Alemany
David Ruy
Marcelo Spina
Brett Steele
Albert Taylor
Peter Testa
Tom Wiscombe
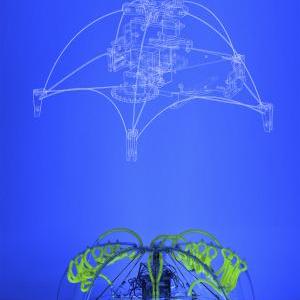
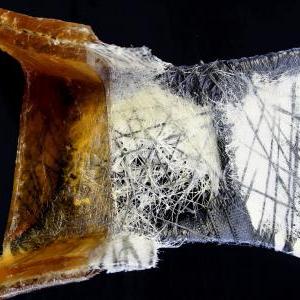


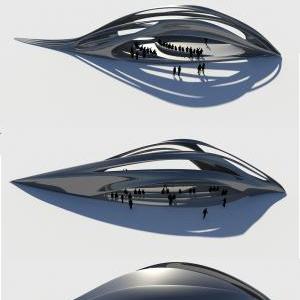


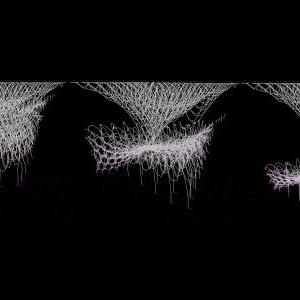


















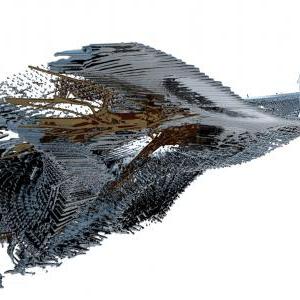








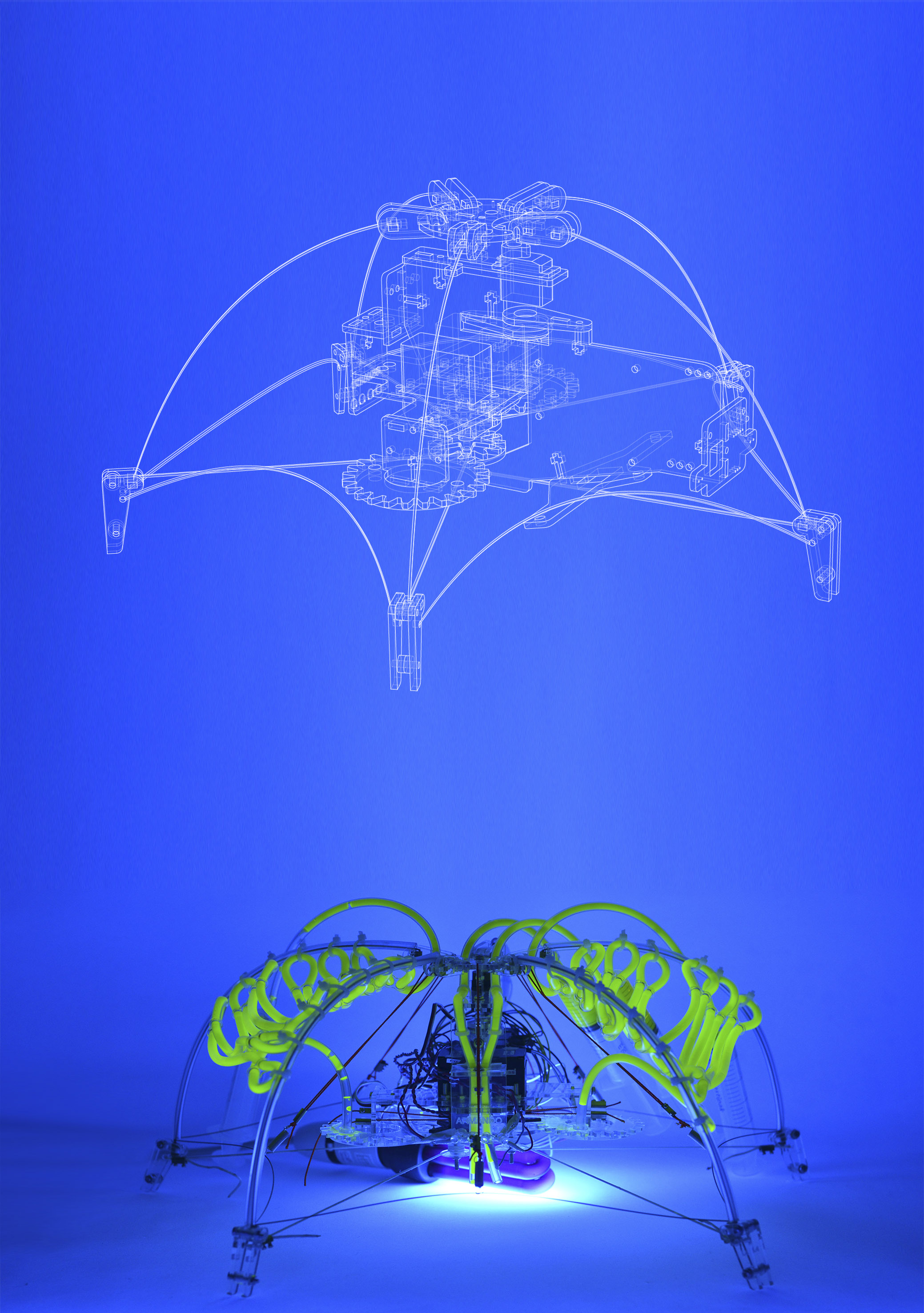
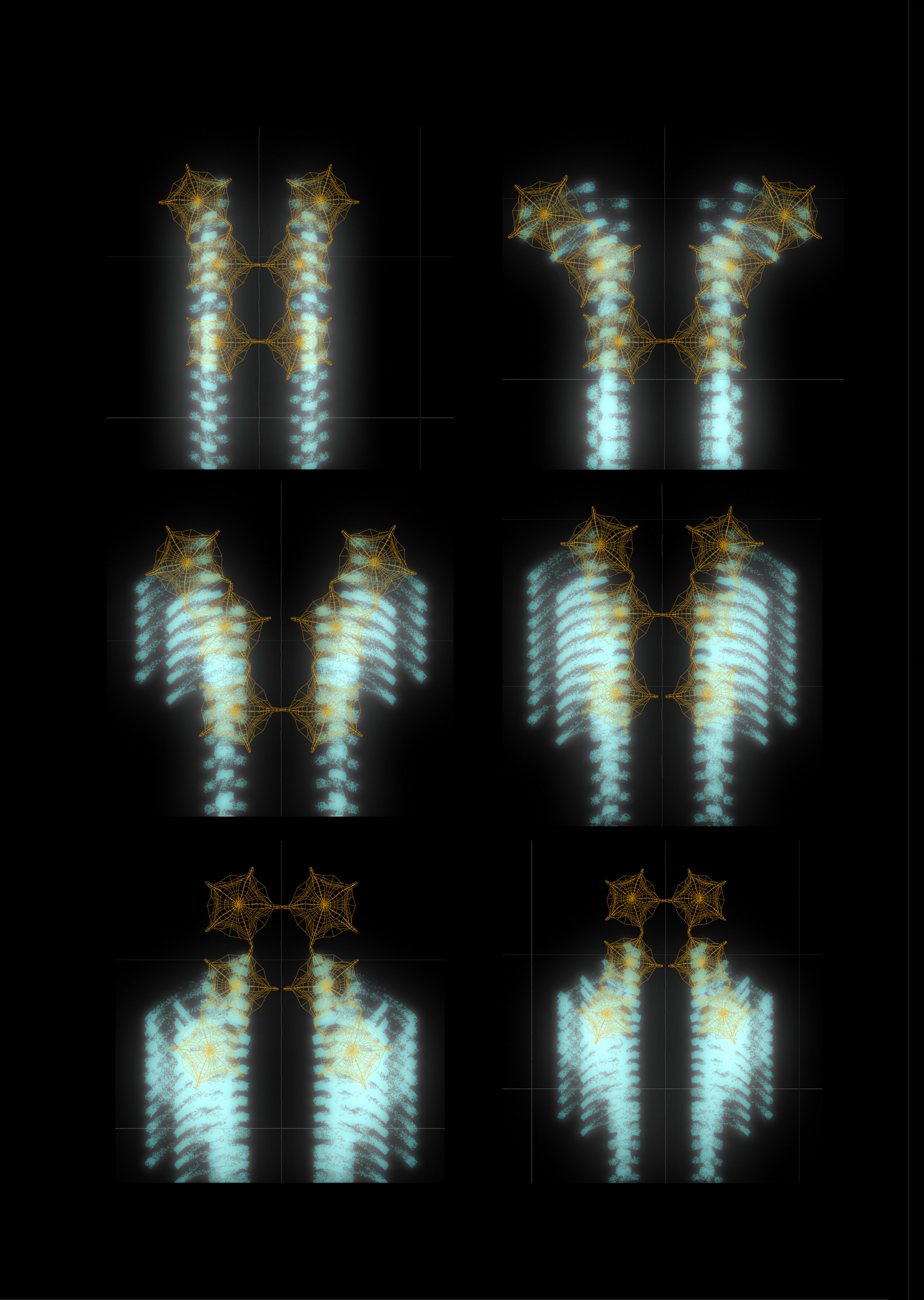
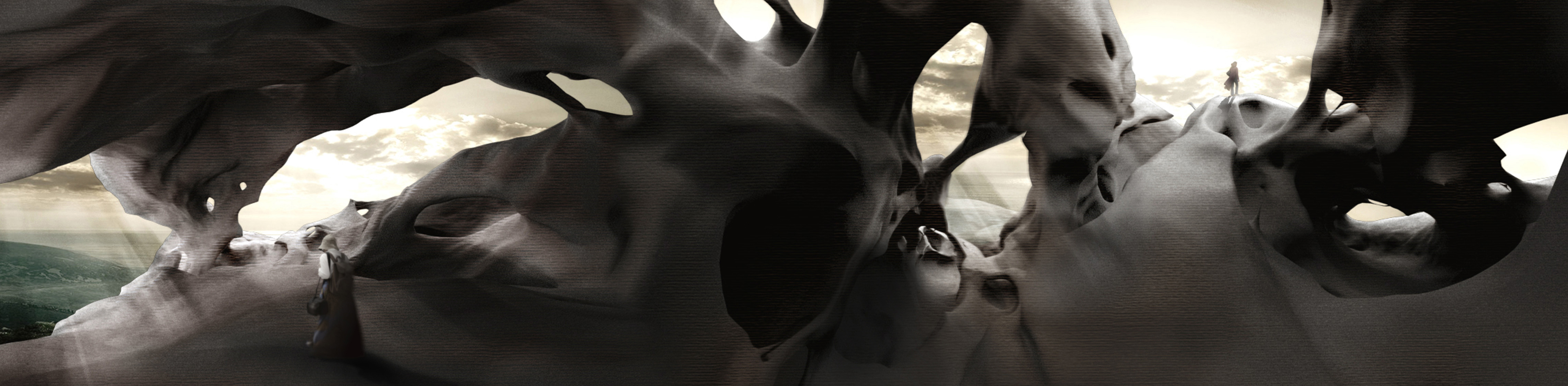
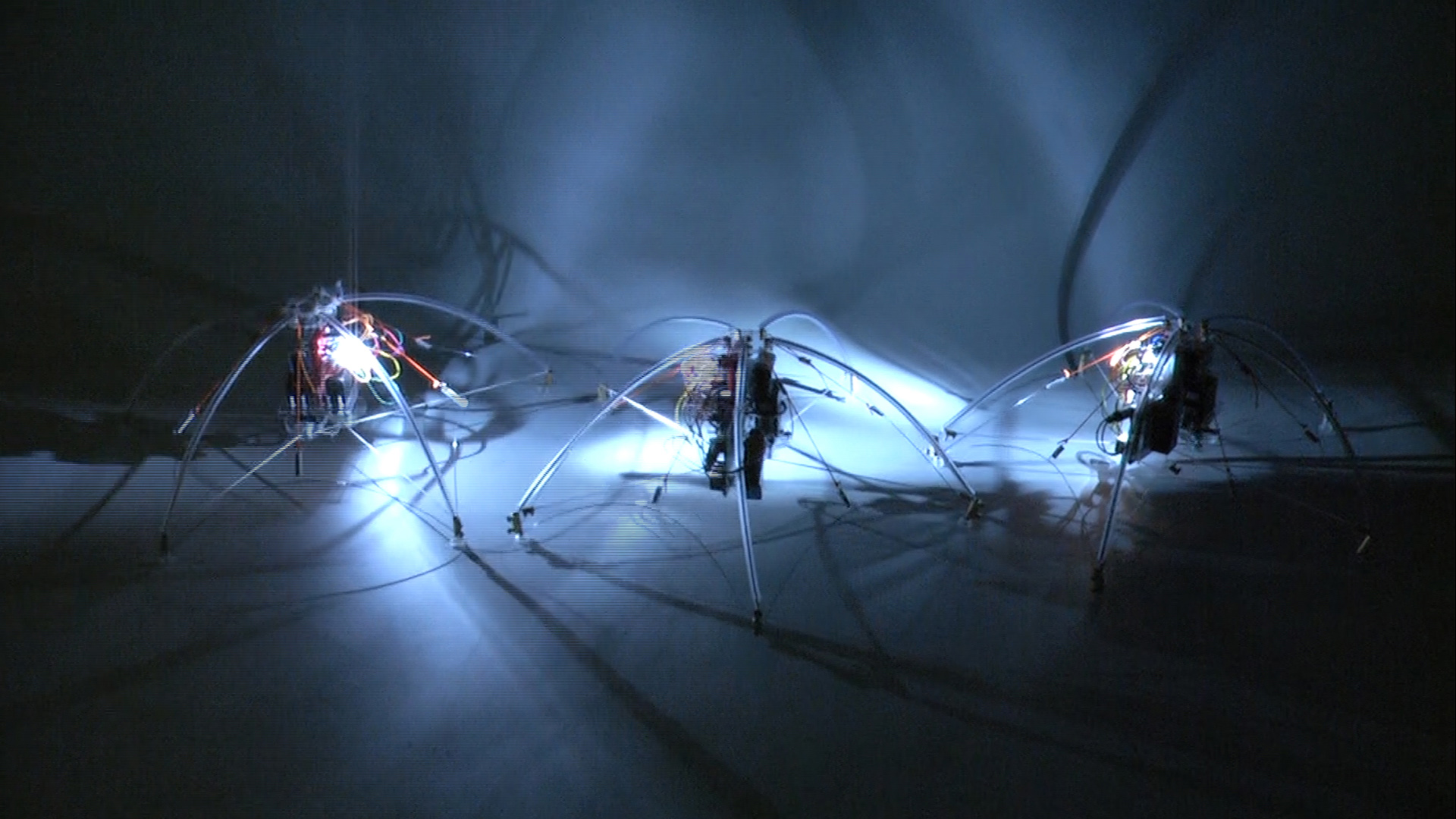
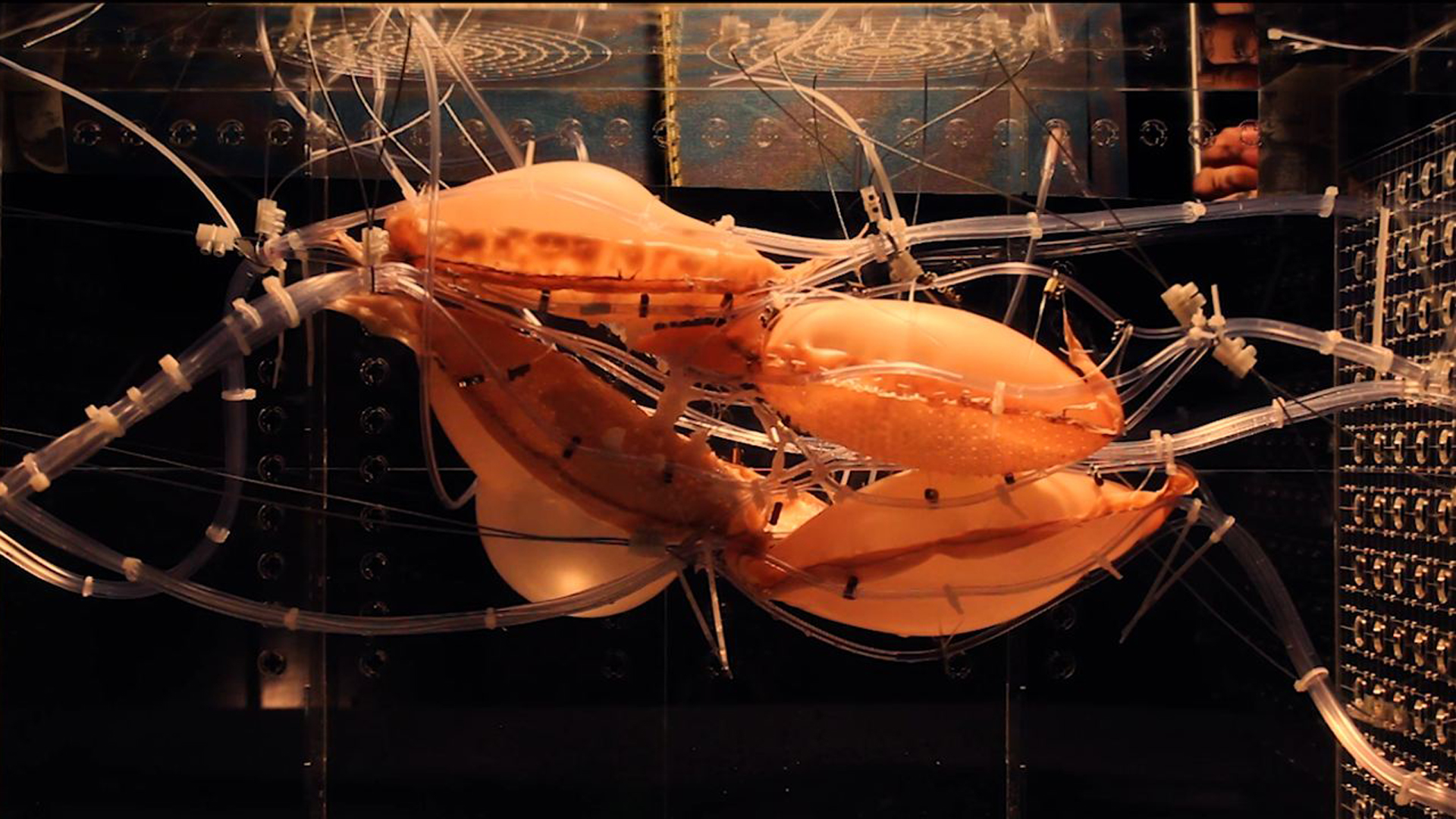

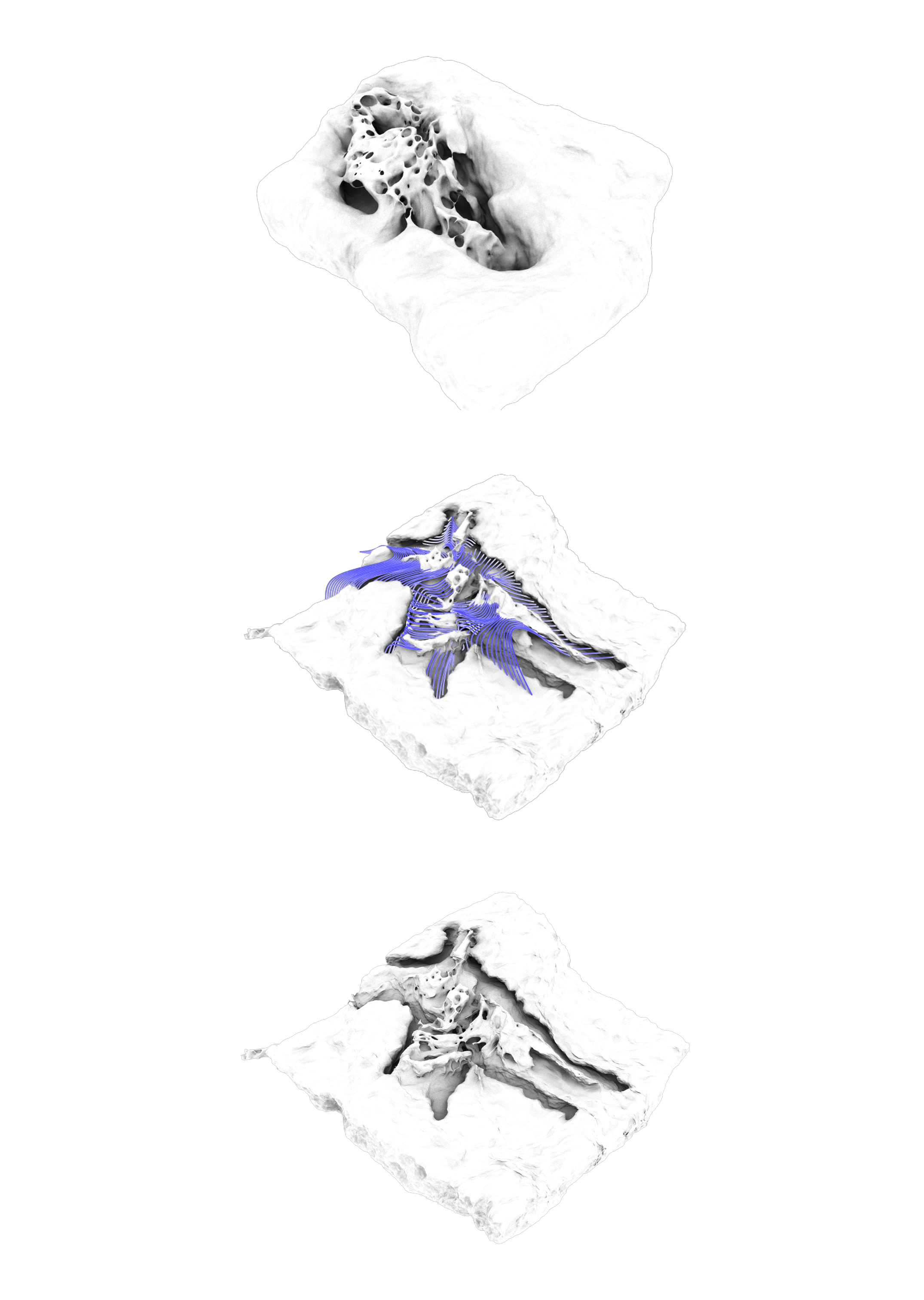


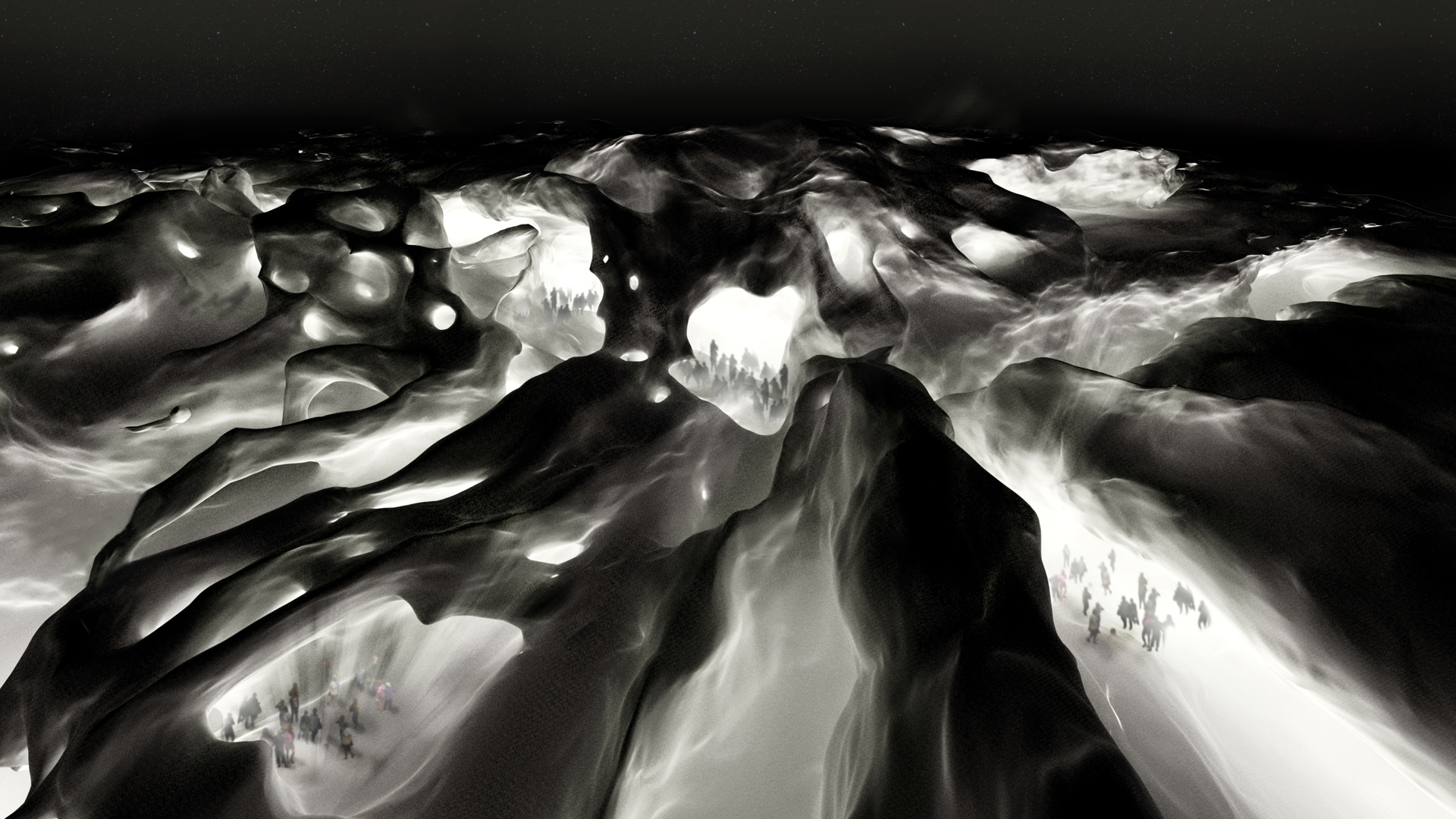
Collapse Collide
Students: Saman Dadgostar (Iran), Sofia Miranta Papageorgiou (Greece), Akber A. Khan (Pakistan), Felipe Sepulveda Rojas (Chile)
Tutors: Theodore Spyropoulos with Mostafa El-Sayed, Manuel Jiménez García
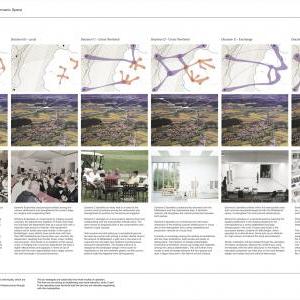
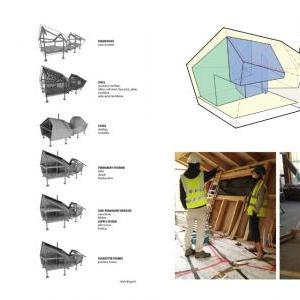
Description: The project is an proto-typical autonomous system employing the use of swarm robotics, which forms the crux of our proposal as it is tested in loose fill environments as an agent of structure and space. Conceived as social insects based upon the rules of stigmergic social hierarchies, our robots organise themselves as an artificial social ecosystem that can be likened most to that of termite ecologies. The deployment of the system begins with an assessment of environmental conditions and parameters, which are then are uploaded into the memory banks of the robots, which are then deployed as clustered packs in target zones via air drop. Final structural and spatial formations are emergent results of stigmergic behaviour resulting from the interaction robots within the environ- ment. Deformations occur as a result of robotic negotiations with the environment's material and specific clustering logics utilised in order to best achieve their organisational and tectonic objec- tives. Aggregation and excavation logics that begin to facilitate the optimised manipulation of loose fill material have been studied through digital simulations and material tests. The prototypical aspect of the project is embodied by the system's ability to be deployed in a variety of loose-fill environments and land topolo- gies, this is justified by the versatility of the stigmergic system developed to organise behavioural outputs of the robot swarm.